
Роботы стали неотъемлемой частью повседневной жизни. Их используют в промышленности, они решают сервисные задачи, участвуют в специальных операциях, действуя как самостоятельно, так и в рамках комплексных решений.
Роботы обладают техническим зрением, понимают голосовые команды и способны автономно действовать в соответствии с заранее заданным алгоритмом.
Настоящую автономность роботы обретают вместе c логическим искусственным интеллектом, благодаря которому получают способность строить алгоритм самостоятельно в динамическом режиме, исходя из поступающих входных данных и поставленных задач.
Интеллектуализация — последний фактор, сдерживающий развитие автономных роботов.
Специалисты НИИ “Мивар” разработали универсальную программную платформу интеллектуализации — “РОБОРАЗУМ”. Ее использование наделяет робототехнические устройства искусственным интеллектом и позволяет реализовать по-настоящему автономное управление.
“РОБОРАЗУМ” реализован в виде встраиваемой программной платформы с гибкими возможностями для адаптации под управление любыми робототехническими комплексами и устройствами. Для эффективной работы не требуется мощных вычислительных ресурсов.
В платформе использованы собственные технологические разработки и подходы команды “Мивар”:
- Миварная модель представления знаний;
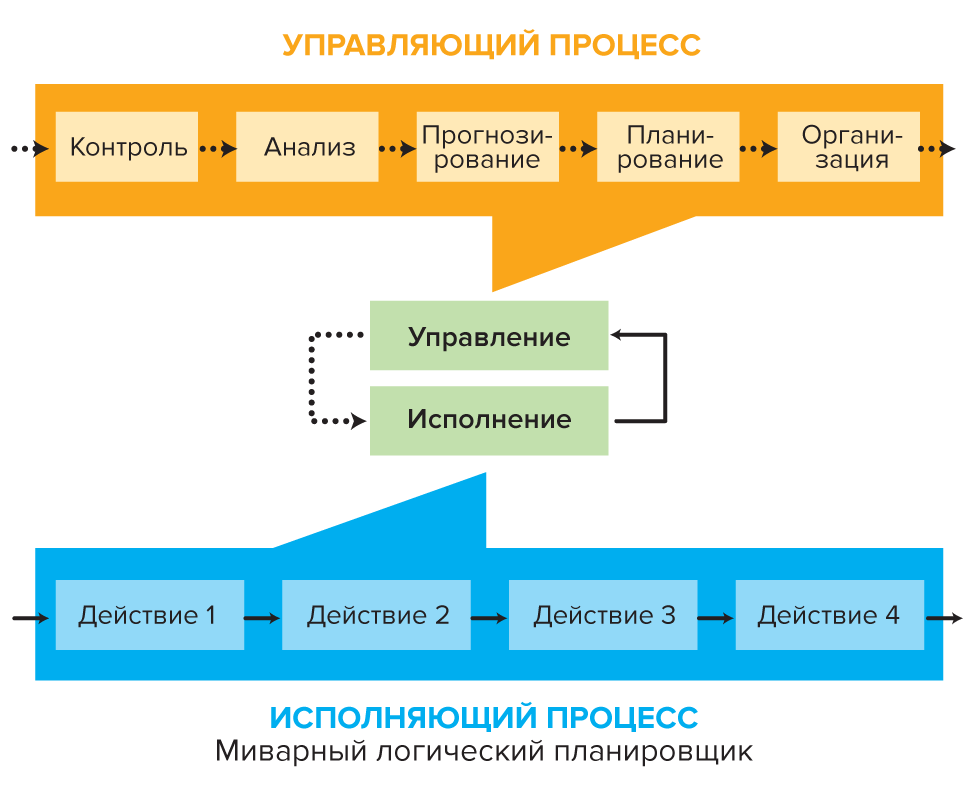
- Миварный метод быстрого синтеза алгоритмов решения произвольных задач;
- Мультиконтурный подход к построению самоорганизующихся систем управления.
Если роботом можно управлять дистанционно, РОБОРАЗУМ сделает его автономным!
Состав решения
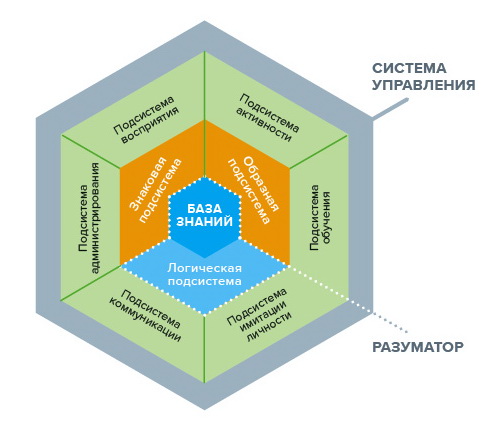
- Логическое ядро (РАЗУМАТОР);
- Подсистемы автономного управления;
- Драйверы.
Ключевым компонентом платформы “РОБОРАЗУМ” является логическое ядро “РАЗУМАТОР”, которое отвечает за логику и автоматическое построение алгоритмов исполнения, позволяет роботам самостоятельно принимать решения и эффективно решать задачи без участия людей.
“РАЗУМАТОР” реализован в виде независимого программного компонента. Данный подход позволяет интегрироваться в любую существующую систему управления роботами в качестве логической подсистемы.
Преимущества решения
- Низкие системные требования;
- Гибкая адаптация под любой тип устройств;
- Легкость интеграции в существующие системы управления.
Ключевые характеристики и функциональные возможности
- Автономное адаптивное управление роботами произвольных конструкций и назначения, не требующее дополнительного программирования;
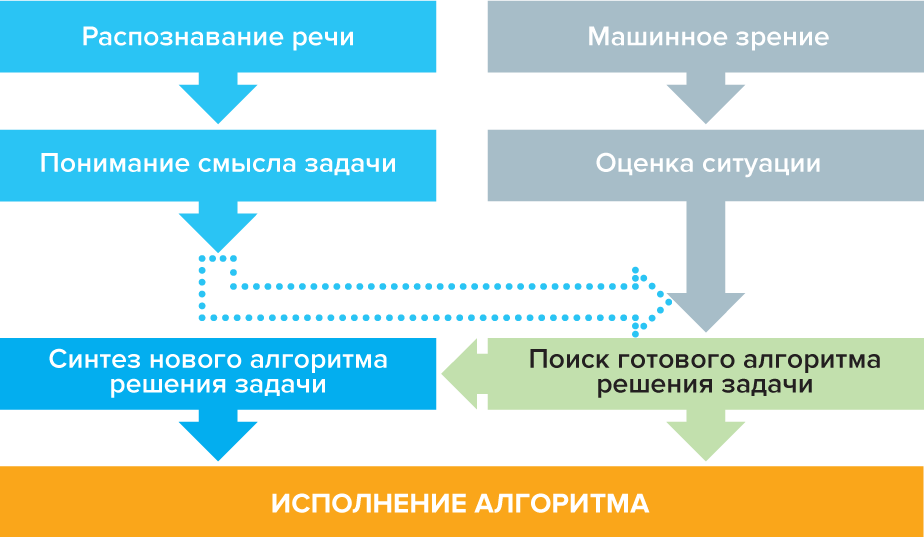
- Применение семантической обработки при решении задач планирования, коммуникации и восприятия;
- Быстрый интеллектуальный синтез новых алгоритмов решения поставленных задач;
- Комплексное пространственное восприятие (техническое зрение, пространственный анализ звуковой сцены и пр.);
- Интерфейс взаимодействия с пользователем на естественном языке;
- Единая интегрированная база знаний для работы всех интеллектуальных подсистем;
- Комплект базовых начальных знаний, позволяющий роботу общаться с человеком, самообучаться и решать простые задачи бытового уровня;
- Самообучение на основе анализа методических материалов, визуальных примеров, собственного опыта;
- Удобная специализация робота путем дополнительного обучения в соответствии с его прикладным назначением.